Engineering Mathematics I
Linear Algebra
Module II: Linear Algebra. This unit builds the foundations of matrix algebra, systems of equations, special matrices, eigen analysis and basic numerical techniques. Emphasis is on exam focused concepts.
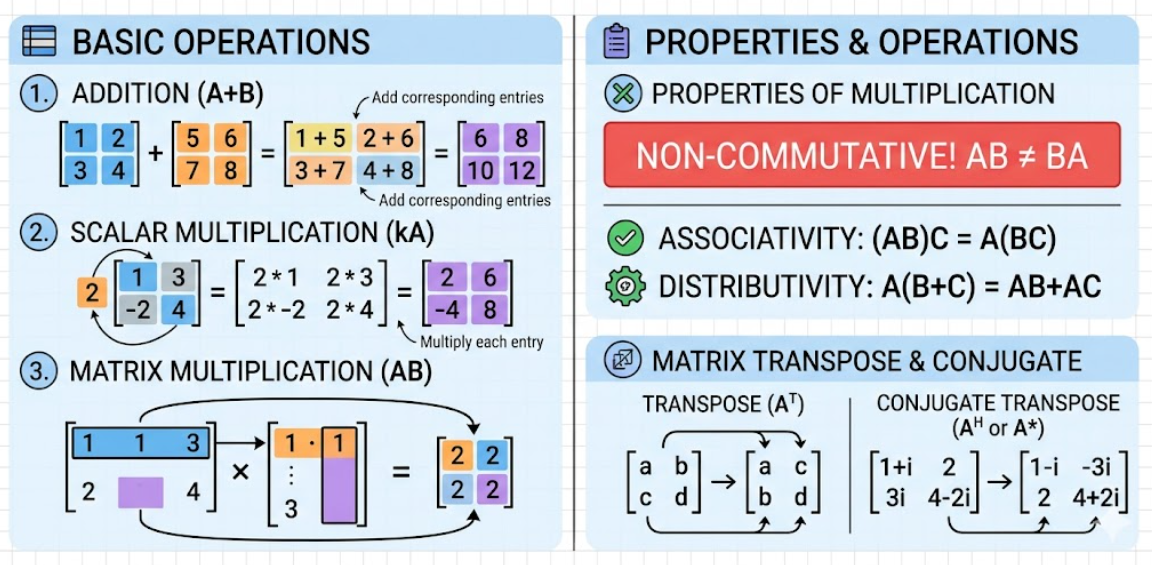
Algebra of Matrices
- Addition, scalar multiplication and matrix multiplication.
- Properties include associativity, distributivity and non-commutativity.
- Transpose and conjugate transpose operations.
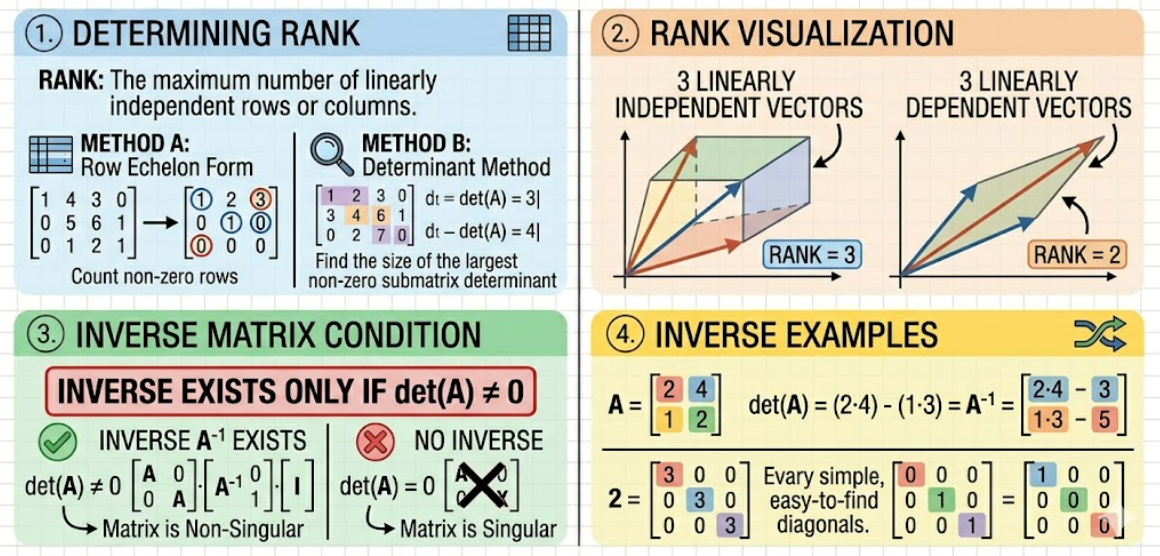
Rank and Inverse of a Matrix
- Rank is the maximum number of linearly independent rows or columns.
- Determined using row echelon form or determinant methods.
- Inverse exists only if det(A) ≠ 0.
Hermitian, Skew Hermitian and Unitary Matrices
- Hermitian: A = A†.
- Skew Hermitian: A = −A†.
- Unitary: A†A = I.
- Important for stability and orthogonality in linear systems.
Eigenvalues and Eigenvectors
- Defined by A x = λ x.
- Obtained from characteristic equation det(A − λI) = 0.
- Used in system stability, diagonalization and modal analysis.
Systems of Linear Equations and Consistency
- Ax = b form.
- Consistent if rank(A) = rank(A b).
- Unique solution if rank(A) = rank(A b) = n.
- Infinite solutions if rank(A) = rank(A b) < n.
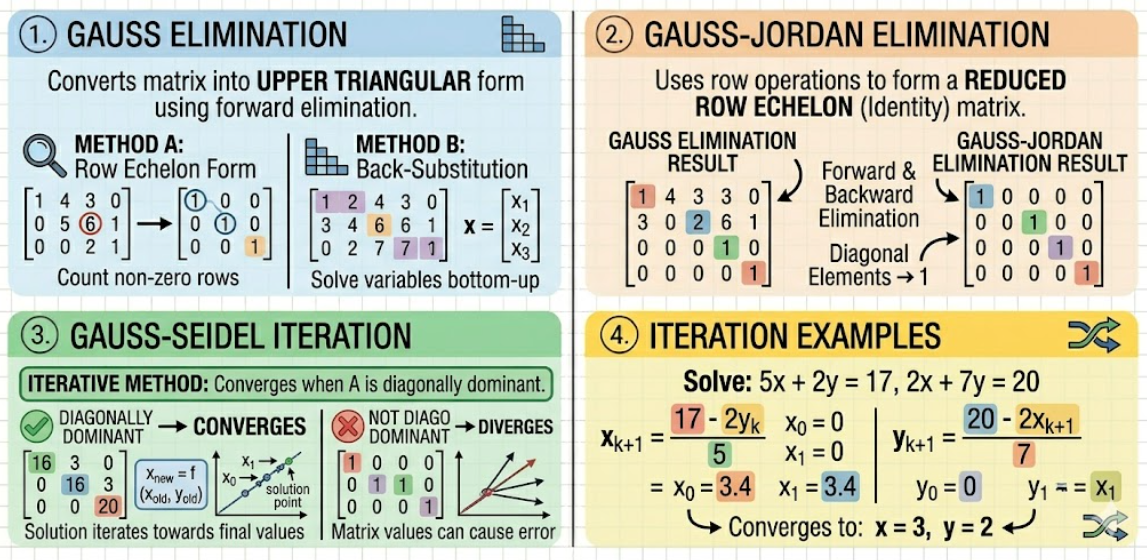
Numerical Methods for Solving Systems
- Gauss elimination and Gauss Jordan elimination.
- Gauss Seidel iterative method.
Vector Spaces and Linear Transformations
- Vector space: set with vector addition and scalar multiplication.
- Basis: minimal set of linearly independent vectors that span the space.
- Linear transformations preserve vector addition and scalar multiplication.